MVP: High-Quality Multi-View Partial Point Cloud Database
News
2022-06-21 Our New Point Cloud Challenge "PointCloud-C" is avaliable here!
2021-12-22 The workshop report is avaliable at Arxiv!
2021-10-17 Awards at ICCV2021 Workshop. Congradulations to all the winner teams!
2021-07-12 The submission on Codalab starts!![]()
2021-07-10
Two benchmarks, Single-View Point Cloud Completion and Partial-to-Partial Point Cloud Registration based on the MVP database have been released.![]()
2021-07-09 An open-source toolbox for Point Cloud Completion and Registration, MVP codebase, has been released. ![]()
2021 The MVP challenges will be hosted in the ICCV2021 Workshop: Sensing, Understanding and Synthesizing Humans.
High-Quality Data
Multi-View Partial Point Clouds |
Complete Point Clouds |
Description
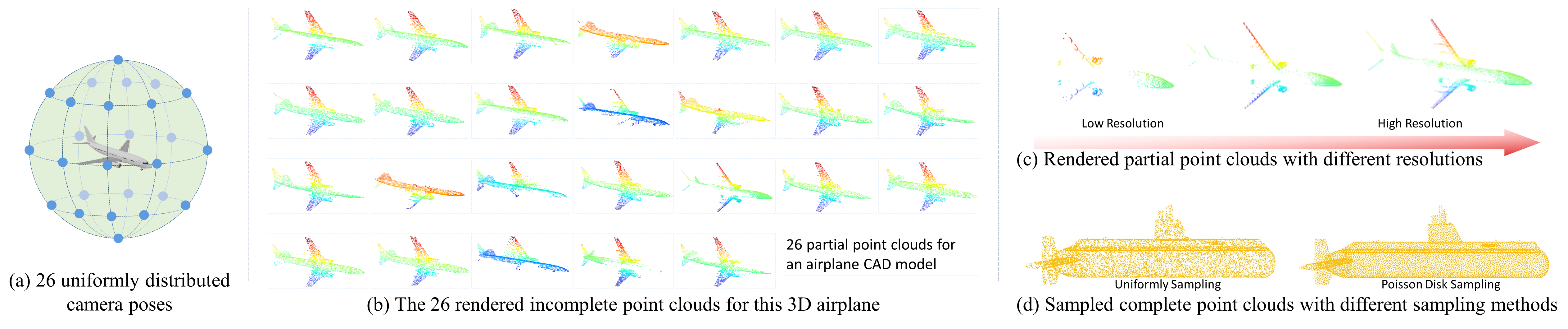
We contribute MVP database, a large-scale Multi-View Partial Point Cloud database, which has several appealing properties:
First, MVP contains over 800,000 diverse partial point clouds, which are rendered by uniformly distributed camera poses.
Second, MVP provides high-quality incomplete and complete ponit clouds from rich categories. We use high-resolution virtual cameras for rendering partial point clouds, and high-quality complete ponit clouds are generated by Possion Disk Sampling.
Third, MVP supports many downstream tasks, such as completion and registration. The two benchmarks, Single-View Point Cloud Completion and Partial-to-Partial Point Cloud Registration, have been released.
Please read Download Instructions below to access the dataset.
Benchmarks
For more details of the benchmarks, please refer to the paper, Variational Relational Point Completion Network, CVPR 2021.
1. Single-View Partial Point Cloud Completion: [Download Page]
Single-View Partial Point Cloud Completion
2. Partial-to-Partial Point Cloud Registration: [Download Page]
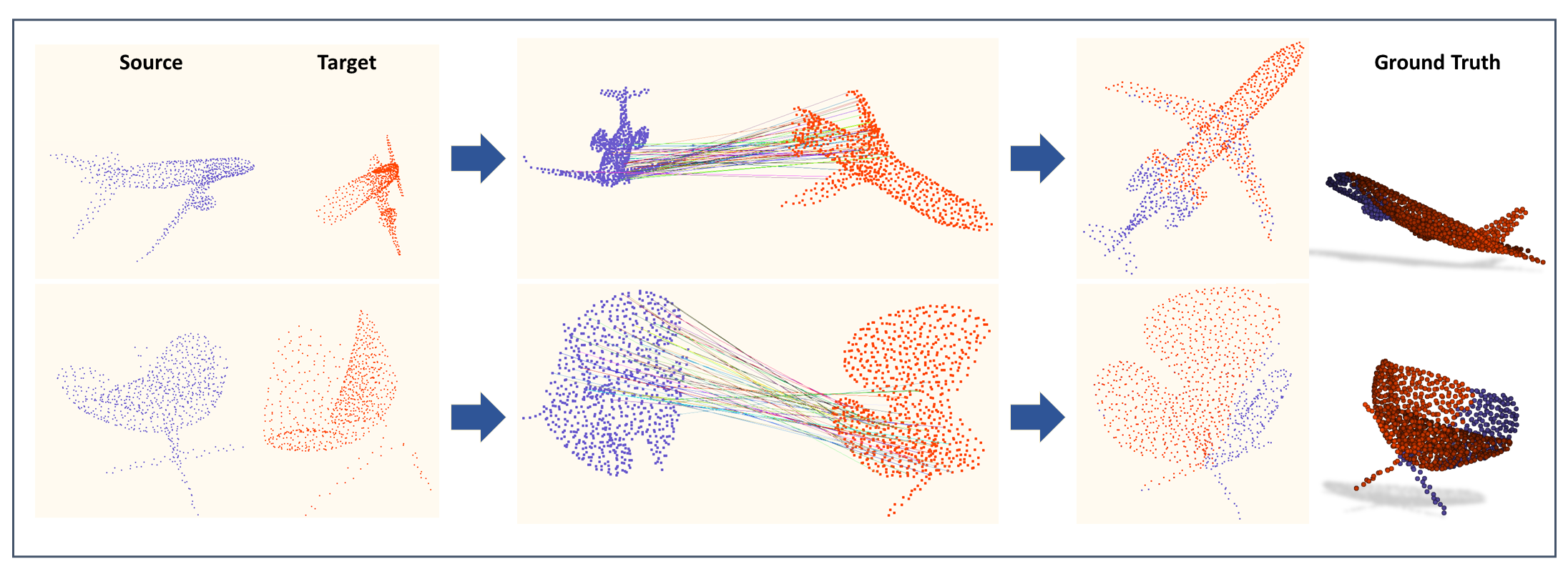
Partial-to-Partial Point Cloud Registration
If the above links are not accessible, you could download the dataset using Google Drive or Baidu Drive (code: p364). More data are released soon.
Agreement
- The MVP is available for non-commercial research purposes only.
- All 3D CADs of the MVP are obtained from the Internet which are not property of S-LAB, The Nanyang Technological University. The S-LAB is not responsible for the content nor the meaning of these CAD models.
- We use ShapeNet data to generate partial and complete point clouds, and you agree to be bounded by ShapeNet terms of use.
- The S-LAB reserves the right to terminate your access to the MVP at any time.
Citation
@inproceedings{pan2021variational,
title={Variational Relational Point Completion Network},
author={Pan, Liang and Chen, Xinyi and Cai, Zhongang and Zhang, Junzhe and Zhao, Haiyu and Yi, Shuai and Liu, Ziwei},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={8524--8533},
year={2021}
}
@article{pan2021robust,
title={Robust Partial-to-Partial Point Cloud Registration in a Full Range},
author={Pan, Liang and Cai, Zhongang and Liu, Ziwei},
journal={arXiv preprint arXiv:2111.15606},
year={2021}
}
Acknowledgement
We sincerely thank the team of ShapeNet.
Contact
If you have any question, please contact Liang Pan at liang.pan@ntu.edu.sg.