High-Quality Multi-View Partial Point Cloud for Registration
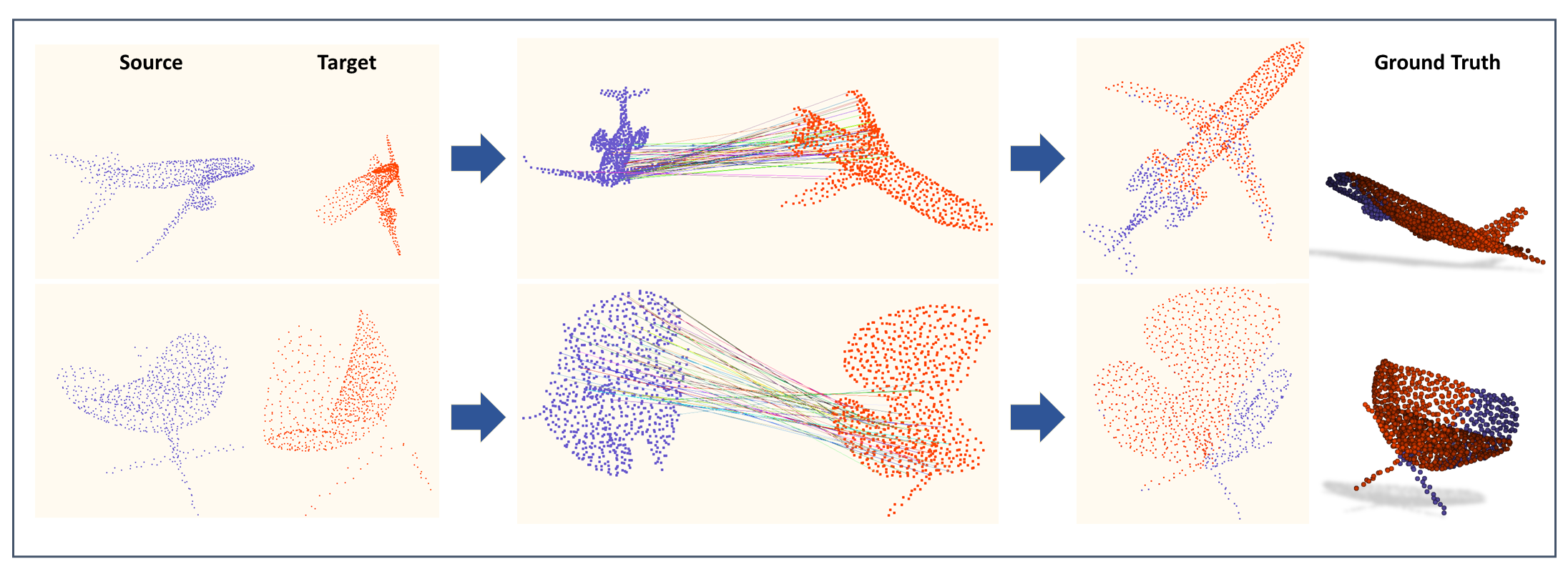
Partial-to-Partial Point Cloud Registration is widely used in many real applications, such as 6D pose estimation and 3D reconstruction. It aims to register a source point cloud to a target point cloud by estimating a rigid transformation based on the overlapped areas between the two point clouds.
News
2021-12-22 The workshop report is avaliable at Arxiv!
2021-10-17 Awards at ICCV2021 Workshop. Congradulations to all the winner teams!
2021-07-12 The submission on Codalab starts!![]()
2021-07-10 The benchmark,
"Partial-to-Partial Point Cloud Registration" has been released.![]()
2021 The MVP challenges will be hosted in the ICCV2021 Workshop: Sensing, Understanding and Synthesizing Humans
.Details
Partial-to-Partial Point Cloud Registration evaluates the performance on partial-to-partial point cloud registration. This is a large subset of MVP, containing massive high-quality incomplete point cloud pairs, and each partial point cloud pair is generated from the same 3D CAD model. It contains 7,600 number of partial point clouds:
The Training set has 6,400 partial point cloud pairs, groundtruth correspondences, category labels and complete point clouds.
The Testing set has 1,200 transformed partial point cloud pairs, canonical partial point cloud pairs, groundtruth transformations, groundtruth correspondences, category labels and complete point clouds.
We keep the groundtruth transformations, and you can evaluate your method by submitting your results on the
Codalab website. The general pipeline is training
your method on the Training set while evaluating on the Testing set.
Download

You can also download data from Baidu Drive (code: p364).
Citation
@article{pan2021robust,
title={Robust Partial-to-Partial Point Cloud Registration in a Full Range},
author={Pan, Liang and Cai, Zhongang and Liu, Ziwei},
journal={arXiv preprint arXiv:2111.15606},
year={2021}
}
Contact
If you have any question, please contact Liang Pan at liang.pan@ntu.edu.sg.